A stable finite element method for an open, inextensible, viscoelastic rod with applications to nematode locomotion
Tom Ranner
Preprint available arxiv:1904.01325. Slides available at tomranner.org/enumath2019

Motivation
C. elegans locomotion in three dimensions
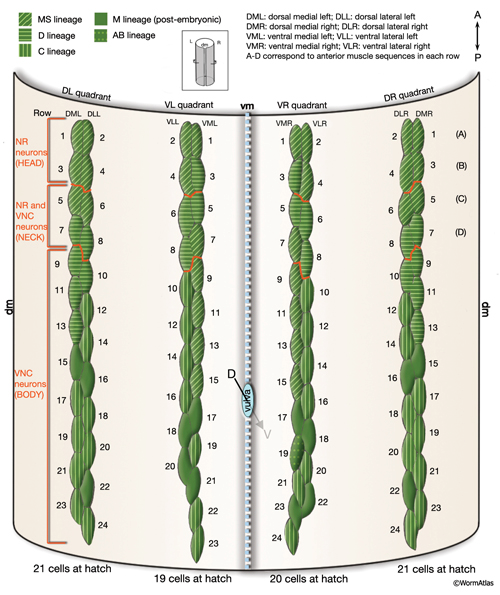
- 1mm long
- 40 μm wide (~hair width)
- Move by passing a travelling wave of muscle contractions down body
- Muscle contractions generate bending (preferred curvature)
- Thrust is in opposite direction to thrust due to anisotropic drag from surrounding fluid (low Reynolds, gel)
The mechanical model
The mechanical model
- viscoelastic rod
- fixed length (inextensibility)
- active bending moment
- environment drag
The muscles
Framed curve
Frame equations
Any (smooth) frame \((\vec{\tau}, \vec{e}_1, \vec{e}_2)\) defines three scalar fields \(\alpha, \beta\) and \(\gamma\) which satisfy:
\[ \frac{1}{|\vec{x}_u|} \vec{\tau}_u = \alpha \vec{e}^1 + \beta \vec{e}^2, \\ \frac{1}{|\vec{x}_u|} \vec{e}^1_u = -\alpha \vec{\tau} + \gamma \vec{e}^2, \\ \frac{1}{|\vec{x}_u|} \vec{e}^2_u = -\beta \tau - \gamma \vec{e}^1. \]
This corresponds to (vector) curvature \(\vec{\kappa} = \alpha \vec{e}^1 + \beta \vec{e}^2\) and twist \(\gamma\).
Darboux vector
We denote by \(\vec{\Omega} = \vec{\tau} \times \vec{\kappa} + \gamma \vec{\tau}\) (Darboux vector). Then \[ \frac{1}{|\vec{x}_u|} \vec{e}^j_u = \vec{\Omega} \times \vec{e}^j. \]
We can do similar for time derivatives. Let \(\vec{\omega} = \vec{\tau} \times \vec{\tau}_t + m \vec{\tau}\) then we have \[ \vec{e}^j_t = \vec{\omega} \times \vec{e}^j. \]
Darboux vector (ii)
- Since the \(u\) and \(t\) time derivatives commute (assuming fixed length), we can deduce that \[ \frac{1}{|\vec{x}_u|} \vec{\omega}_u - \vec{\Omega}_t = \vec{\omega} \times \Omega. \] In particular, \[ \frac{m_u}{| \vec{x}_u |} - \gamma_t + \frac{\vec{x}_{ut}}{| \vec{x}_u |} \cdot ( \vec{\tau} \times \vec{\kappa} ) = 0. \]
Model ingredients
- Passive moment: (linear viscoelastic) \[ \vec{M}^p = \vec{\tau} \times ( A ( \alpha \vec{e}_1 + \beta \vec{e}_2 ) + B ( \alpha_t \vec{e}_1 + \beta_t \vec{e}_2 ) + C \gamma \vec\tau + D \gamma_t \vec\tau ). \]
- Active moment: (from muscles - in application \(\gamma_0 = 0\)) \[ \vec{M}^a = - \vec{\tau} \times ( A \alpha_0 \vec{e}_1 + B \beta_0 \vec{e}_2 ) - D \gamma_0 \vec\tau, \]
- Environment forces: (resistive forces, not fundamental derivation) \[ \vec{D}_{\text{lin}} = \K \vec{x}_t + K_\nu ( {\id}- \tau \otimes \tau ) \vec{x}_t, \qquad \vec{D}_\text{rot} = -K_\text{rot} m \vec{\tau} \]
Summary of equations and unknowns
Unknowns
- \(\vec{x}\) - position
- \(p\) - line tension
- \(\vec{\kappa}\) - vector curvature
- \(\gamma\) - twist
- \(\vec{y}\) - bending moment
- \(z\) - twisting moment
- \(m\) - tangential angular momentum
- \(\vec{e}_1, \vec{e}_2\) - the frame
Equations
- Two from balance laws
- Two from geometry
- Two from moment constitutive laws
- Inextensibility constraint
- Frame update equations
- Boundary and initial conditions
Equations look like fourth order parabolic equation for \(x\), with local length constraint, coupled to second order parabolic for \(\gamma\).
Discretization
Discretization ideas
We split the domain \((0,1)\) into equal elements of length \(h\) and choose a time step \(\Delta t\)
We use a combination of piecewise linear finite elements \(V_h\) and piecewise constant functions \(Q_h\).
Use mass lumping for vertex-wise updates.
Two tangent vectors
For a discrete parametrisation \(\vec{x}_h \in V_h^3\), we introduce two different tangent vector fields.
\(\vec{\tau}_h \in Q_h^3\) as the piecewise constant normalised derivative of \(\vec{x}_h\): \(\vec{\tau}_h = {\vec{x}_{h,u}} / { |\vec{x}_{h,u}| }\).
\(\tilde{\vec{\tau}}_h \in V_h^3\) with vertex values given by \[ \tilde{\vec{\tau}}_h( u_j, \cdot ) = \frac{ \vec{\tau}_{h}( u_i^-, \cdot) + \vec{\tau}_h( u_i^+, \cdot ) }{| \vec{\tau}_{h}( u_i^-, \cdot) + \vec{\tau}_h( u_i^+, \cdot ) |} \quad \mbox{ for } i = 1, \ldots, N, \]
where \(\vec\tau_h( u_i^\pm, \cdot )\) is \(\vec{\tau}_h\) evaluated on the left (or right) element to the vertex \(u_i\).
Discretization choices
| Variable | Name | Discrete variable | Space |
|---|---|---|---|
| \(\vec{x}\) | position | \(\vec{x}_h\) | \(V_h^3\) |
| \(p\) | line tension | \(p_h\) | \(Q_h\) |
| \(\vec{\kappa}\) | vector curvature | \(\vec{\kappa}_h\) | \(V_h^3\) |
| \(\gamma\) | twist | \(\gamma_h\) | \(Q_h\) |
| \(\vec{y}\) | bending moment | \(\vec{y}_h\) | \(V_h^3\) |
| \(z\) | twisting moment | \(z_h\) | \(Q_h\) |
| \(m\) | tangential angular momentum | \(m_h\) | \(V_h\) |
| \(\vec{e}_1, \vec{e}_2\) | the frame | \(\vec{e}_{1,h}, \vec{e}_{2,h}\) | \(V_h^3\) |
Semi-discrete scheme
Given preferred curvatures \(\alpha^0, \beta^0\), a preferred twist \(\gamma_0\), and initial conditions for \(\vec{x}_h, \gamma_h\) (which imply compatible initial conditions for \(\vec{w}_h\), \(\vec{e}_{1,h}\) and \(\vec{e}_{2,h}\) up to a fixed rotation), for \(t \in [0,T]\), find \(\vec{x}_h( \cdot, t) \in V_h^3, \vec{y}_h( \cdot, t) \in V_{h,0}^3, \vec{w}_h( \cdot, t ) \in V_{h,0}^3 + \vec{w}_b(\cdot,t)\),\(m_h( \cdot, t ) \in V_h, z_h( \cdot, t ), \gamma_h( \cdot, t), p_h( \cdot, t ) \in Q_h\), \(\vec{e}_{h,1}( \cdot, t ), \vec{e}_{h,2}( \cdot, t ) \in V_h^3\) such that
\[ \begin{align} \label{eq:fem-x} \int_0^1 \K \vec{x}_{h,t} \cdot \vec{\phi}_h | \vec{x}_{h,u} | - \int_0^1 p_h \vec\tau_h \cdot \vec{\phi}_{h,u} \qquad\qquad\qquad\qquad\qquad\qquad & \\ \nonumber - \int_0^1 \bigl( ( \id - \vec\tau_h \otimes \vec\tau_h ) \frac{\vec{y}_{h,u}}{| \vec{x}_{h,u} |} + z_h \vec\tau_h \times \vec{w}_h \bigr) \cdot \vec{\phi}_{h,u} & = 0 \\ % \label{eq:fem-y} \int_0^1 \Bigl( \bigl( \vec{y}_h - A ( \vec{w}_h - \alpha^0 \vec{e}_{1,h} - \beta^0 \vec{e}_{2,h} ) \qquad\qquad\qquad\qquad\qquad\qquad & \\ \nonumber - B ( ( \id - \tilde{\vec\tau}_h \otimes \tilde{\vec\tau}_h ) \vec{w}_{h,t} - m_h \tilde{\vec\tau}_h \times \vec{w}_h ) \bigr) \cdot \vec{\psi}_h \Bigr)_h | \vec{x}_{h,u} | & = 0 \\ % \label{eq:fem-w} \int_0^1 ( \vec{w}_h \cdot \vec\psi_h )_h | \vec{x}_{h,u} | + \frac{\vec{x}_{h,u}}{ | \vec{x}_{h,u} | } \cdot \vec\psi_{h,u} & = 0 \end{align} \] for all \(\vec\phi_h \in V_h^3\), \(\vec\psi_h \in V_{h,0}^3\), \[ \begin{align} \label{eq:fem-gamma} \int_0^1 - ( K^\rot m_h v_h )_h | \vec{x}_{h,u} | - \int_0^1 z_h v_{h,u} + \int_0^1 ( \vec{y}_h \cdot ( \tilde{\vec\tau}_h \times \vec{w}_h ) v_h )_h | \vec{x}_{h,u} | & = 0, \\ % \label{eq:fem-z} \int_0^1 ( z_h - C ( \gamma_h - \gamma^0 ) - D \gamma_{h,t} ) q_h | \vec{x}_{h,u} | & = 0, \\ % \label{eq:fem-m} \int_0^1 \gamma_{h,t} q_h | \vec{x}_{h,u} | - \int_0^1 m_{u,h} q_h + \int_0^1 \vec\tau_h \times \vec{w}_h \cdot \vec{x}_{h,tu} q_h & = 0 \end{align} \] for all \(q_h \in Q_h\) and \(v_h \in V_h\), \[ \begin{align} \label{eq:fem-p} \int_0^1 q_h \vec\tau_h \cdot \vec{x}_{h,tu} & = 0, \end{align} \] for all \(q_h \in Q_h\), and \[ \begin{equation} \label{eq:fem-frame} \int_0^1 \Bigl( \bigl( \vec{e}_{h,j,t} - \bigl( \tilde{\vec{\tau}}_h \times \tilde{\vec{\tau}}_{h,t} + m_h \tilde{\vec{\tau}}_h \bigr) \times \vec{e}_{h,j} \bigr) \cdot \vec{\phi}_h \Bigr)_h | \vec{x}_{h,u} | = 0, \mbox{ for } j = 1,2, \end{equation} \] for all \(\vec{\phi}_h\in V_h^3\).
Semi-discrete stability
Lemma If \(\alpha^0, \beta^0, \gamma^0\) are independent of time, any solution to the above problem satisfies: \[ \begin{multline*} \int_0^1 ( \K \vec{x}_{h,t} \cdot \vec{x}_{h,t} + K^\rot_h m_h^2 ) | \vec{x}_{h,u} | \\ + \frac{1}{2} \ddt \int_0^1 \bigl( A \bigl( ( \alpha_h - \alpha^0 )^2 + ( \beta_h - \beta^0 )^2 \bigr)_h + C ( \gamma_h - \gamma^0 )^2 \bigr) | \vec{x}_{h,u} | \\ + \int_0^1 \bigl( ( B ( \alpha_{h,t}^2 + \beta_{h,t}^2 ) )_h + D \gamma_{h,t}^2 \bigr) | \vec{x}_{h,u} | = 0. \end{multline*} \]
Full discrete scheme
Given preferred curvatures \(\alpha^0, \beta^0\), a preferred twist \(\gamma^0\), and initial conditions for \(\vec{x}_h^0, \gamma_h^0\), (which imply compatible initial conditions for \(\vec{w}_h^0\), \(\vec{e}_{1,h}^0\), \(\vec{e}_{2,h}^0\) up to a fixed rotation), for \(n = 1, \ldots, M\) find \(\vec{x}_h^n \in V_h^3, \vec{y}_h^n \in V_{h,0}^3, \vec{w}_h^n \in V_{h,0}^3 + \vec{w}_{b}^n\), \(m_h^n \in V_h, z_h^n, \gamma_h^n, p_h^n \in Q_h\), \(\vec{e}_{h,1}^n, \vec{e}_{h,2}^n \in V_h^3\) such that \[ \begin{align} \label{eq:discrete-x} \int_0^1 \K \bar\partial \vec{x}_{h}^n \cdot \vec{\phi}_h | \vec{x}_{h,u}^{n-1} | - \int_0^1 p_h^n \vec\tau_h \cdot \vec{\phi}_{h,u} \qquad\qquad\qquad\qquad\qquad\qquad \\ \nonumber - \int_0^1 \bigl( ( \id - \vec\tau_h^{n-1} \otimes \vec\tau_h^{n-1} ) \frac{1}{| \vec{x}_{h,u}^{n-1} |} \vec{y}_{h,u}^n + z_h^n \vec\tau_h^{n-1} \times \vec{w}_h^{n-1} \bigr) \cdot \vec{\phi}_{h,u} & = 0 \\ % \label{eq:discrete-y} \int_0^1 \bigl( \vec{y}_h^{n} - A ( \vec{w}_h^n - \alpha^0( \cdot, t^n ) \vec{e}_{1,h}^{n-1} - \beta^0( \cdot, t^n ) \vec{e}_{2,h}^{n-1} ) \qquad\qquad\qquad\qquad \\ \nonumber - B \bigl( ( \id - \tilde{\vec\tau}_h^{n-1} \otimes \tilde{\vec\tau}_h^{n-1} ) \bar\partial \vec{w}_{h}^n - m_h^{n-1} \tilde{\vec\tau}_h^{n-1} \vec{w}_h^n \bigr)_h \bigr) \cdot \vec\psi_h | \vec{x}_{h,u}^{n-1} | & = 0 \\ \label{eq:discrete-w} \int_0^1 \vec{w}_h^{n} \cdot \vec\psi_h | \vec{x}_{h,u}^{n-1} | + \frac{1}{ | \vec{x}_{h,u}^{n-1} | } \vec{x}_{h,u}^n \cdot \vec\psi_{h,u} & = 0 \end{align} \] for all \(\vec\phi_h \in V_h^3\), \(\vec\psi_h \in V_{h,0}^3\), \[ \begin{align} \label{eq:discrete-gamma} \int_0^1 - K^\rot m_h^n v_h | \vec{x}_{h,u}^{n-1} | - \int_0^1 z_h^n v_{h,u} + \int_0^1 \vec{y}_h^{n-1} \cdot ( \tilde{\vec\tau}_h^{n-1} \times \vec{w}_h^{n-1} ) v_h | \vec{x}_{h,u}^{n-1} | & = 0, \\ % \label{eq:discrete-z} \int_0^1 ( z_h^n - C ( \gamma_h^n - \gamma^0( \cdot, t^n) ) - D \bar\partial \gamma_{h}^n ) q_h | \vec{x}_{h,u}^{n-1} | & = 0, \\ % \label{eq:discrete-m} \int_0^1 \bar\partial \gamma_{h}^n q_h | \vec{x}_{h,u}^{n-1} | - \int_0^1 m_{u,h} q_h + \int_0^1 ( \vec\tau_h^{n-1} \times \vec{w}_h^{n-1} ) \cdot \bar\partial \vec{x}_{h,u}^n q_h & = 0 \end{align} \] for all \(q_h \in Q_h\) and \(v_h \in V_h\), \[ \begin{align} \label{eq:discrete-p} \int_0^1 q_h \vec\tau_h^{n-1} \cdot \vec{x}_{h,u}^n & = \int_0^1 | \vec{x}_{h,0,u} | q_h, \end{align} \] for all \(q_h \in Q_h\). Using the abbreviations: \[ \begin{align} \vec{k}_i^n & = \tilde{\vec\tau}_h^{n-1}( u_i ) \times \tilde{\vec\tau}_h^n( u_i ), &\vec{l}_i^n & = \tilde{\vec{\tau}}^n_h( u_i ), & \varphi_i^n & = \Delta t \, m_h^n( u_i ), \end{align} \] we apply the Rodrigues formula twice: \[ \begin{align} \label{eq:discrete-e1-R1} \tilde{\vec{e}}_{j,h}^n( u_i ) & = \vec{e}_{j,h}^{n-1}( u_i ) ( \tilde{\vec\tau}_h^{n-1}( u_i ) \cdot \tilde{\vec\tau}_h^{n}( u_i )) + \vec{k}_i^n \times \vec{e}_{j,h}^{n-1}( u_i ) \\ \nonumber & \qquad + \vec{e}_{j,h}^{n-1}( u_i ) \cdot \vec{k}_i^n \vec{k}_i^n \frac{1}{1 + \tilde{\vec\tau}_h^{n-1}( u_i ) \cdot \tilde{\vec\tau}_h^{n}( u_i )} && j=1,2 \\ % \label{eq:discrete-e1-R2} {\vec{e}}_{j,h}^n( u_i ) & = \tilde{\vec{e}}_{j,h}^n( u_i ) \cos( \varphi_i ) + \vec{l}_i^n \times \tilde{\vec{e}}_{j,h}^n( u_i ) \sin( \varphi_i ) \\ \nonumber & \qquad + ( \tilde{\vec{e}}_{j,h}^n( u_i ) \cdot \vec{l}_i^n )\vec{l}_i^n ( 1 - \cos( \varphi_i ) ) && j=1,2. \end{align} \]
Full discrete scheme: frame update
Using the abbreviations: \[ \vec{k}_i^n = \tilde{\vec\tau}_h^{n-1}( u_i ) \times \tilde{\vec\tau}_h^n( u_i ), \vec{l}_i^n = \tilde{\vec{\tau}}^n_h( u_i ), \varphi_i^n = \Delta t \, m_h^n( u_i ), \] we apply the Rodrigues formula twice (for \(j=1,2\)): \[ \begin{multline*} \tilde{\vec{e}}_{j,h}^n( u_i ) = \vec{e}_{j,h}^{n-1}( u_i ) ( \tilde{\vec\tau}_h^{n-1}( u_i ) \cdot \tilde{\vec\tau}_h^{n}( u_i )) + \vec{k}_i^n \times \vec{e}_{j,h}^{n-1}( u_i ) \\ + \vec{e}_{j,h}^{n-1}( u_i ) \cdot \vec{k}_i^n \vec{k}_i^n \frac{1}{1 + \tilde{\vec\tau}_h^{n-1}( u_i ) \cdot \tilde{\vec\tau}_h^{n}( u_i )} \end{multline*} \] \[ \begin{multline*} \vec{e}_{j,h}^n( u_i ) = \tilde{\vec{e}}_{j,h}^n( u_i ) \cos( \varphi_i ) + \vec{l}_i^n \times \tilde{\vec{e}}_{j,h}^n( u_i ) \sin( \varphi_i ) \\ \nonumber \qquad + ( \tilde{\vec{e}}_{j,h}^n( u_i ) \cdot \vec{l}_i^n )\vec{l}_i^n ( 1 - \cos( \varphi_i ) ). \end{multline*} \]
Frame update equations maintain frame orthonormality
- The first rotation maps \(\tilde{\vec{\tau}}_h^{n-1}\) onto \(\tilde{\vec{\tau}}_h^n\)
- The second rotates the frame about the new \(\tilde{\vec\tau}_h^n\) (leaving \(\tilde{\vec\tau}_h^n\) unaffected).
- Since we apply the same rotations to the two frame vectors, and these rotations map \(\tilde{\vec\tau}_h^{n-1}\) to \(\tilde{\vec\tau}_h^n\), this update procedure results preserves the orthogonality of the frame vectors at each vertex.
- In practice floating point errors accumulate. The frames could be periodically re-orthonormalized.
Constraint equation gives control of length element
Lemma. If we approximate the constraint equation by \[ \int_0^1 \frac{ \vec{x}_{h,u}^n }{ | \vec{x}_{h,u}^n | } \cdot \vec{x}_{hu}^{n+1} q_h = \int_0^1 L q_h, \] then \[ | \vec{x}_{h,u}^{n+1} | = \frac{ L }{ 1 - \frac{1}{2} | \vec{\tau}_h^{n+1} - \vec{\tau}_h^{n} |^2 } \]
Results
Relaxation
\[ \alpha^0 = 2 \sin( 3 \pi u / 2 ), \quad \beta^0 = 3 \cos( 3 \pi u / 2 ), \quad \gamma^0 = 5 \cos( 2 \pi u ). \]
Relaxation - energy (refinement in space and time)

\[ \mathcal{E}(t^n) := \int_0^1 \Bigl( A | \vec{\kappa}_h - \alpha^0 \vec{e}_{1,h}^n - \beta^0 \vec{e}_{2,h} |^2 + C( \gamma_h^n - \gamma^0 )^2 \Bigr)_h | \vec{x}_{h,u}^n | \]
Relaxation - accuracy tests
Error in length element: \[ \mathcal{F}_1(t^n) := \left| \int_0^1 | \vec{x}_{h,u}^n | - L \right|. \]
Error in frame orthonormality: \[ \mathcal{F}_2(t^n) := \left( \sum_{0 \le j_1 \le j_2 \le 2} \int_0^1 | \vec{e}_{j_1,h}^n \cdot \vec{e}_{j_2,h}^n - \delta_{j_1, j_2} |^2 | \vec{x}_{h,u}^n | \right)^{{1}/{2}}. \]
Relaxation - accuracy tests

Planar locomotion
Some 3d results - head twitching
Some 3d results - head twitching

Open questions
- Identify appropriate material parameters!
- Can we show full-discrete stability or error bounds for our numerical scheme (robustness)?
- Can we verify simplifying assumptions (RFT, effects of nonlinear (visco)elasticity, incompressibility)?
- Can we do more to relate this to the biology?
Thank you for your attention! Preprint available arxiv:1904.01325. Slides available at tomranner.org/enumath2019